|
pcb 4.1.1
An interactive printed circuit board layout editor.
|
|
pcb 4.1.1
An interactive printed circuit board layout editor.
|
Transform jaggy paths into smooth curves. More...
#include <stdio.h>#include <math.h>#include <stdlib.h>#include <string.h>#include "global.h"#include "potracelib.h"#include "curve.h"#include "lists.h"#include "auxiliary.h"#include "trace.h"#include "pcb-printf.h"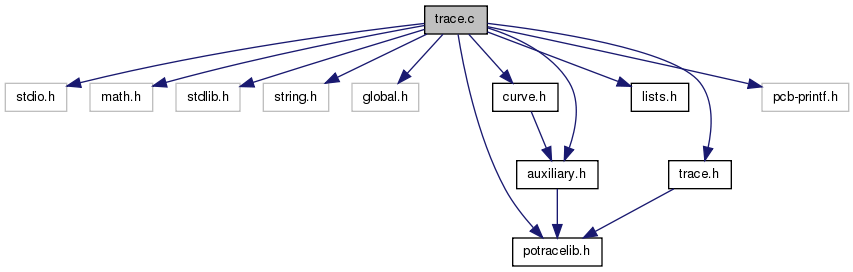
Go to the source code of this file.
Data Structures | |
| struct | opti_s |
| A private type for the result of opti_penalty. More... | |
Defines | |
| #define | INFTY 10000000 |
| It suffices that this is longer than any path; it need not be really infinite. | |
| #define | COS179 -0.999847695156 |
| The cosine of 179 degrees. | |
| #define | SAFE_MALLOC(var, n, typ) if ((var = (typ *)malloc((n)*sizeof(typ))) == NULL) goto malloc_error |
| #define | TRY(x) if (x) goto try_error |
Typedefs | |
| typedef double | quadform_t [3][3] |
| The type of (affine) quadratic forms, represented as symmetric 3x3 matrices. | |
| typedef struct opti_s | opti_t |
Functions | |
| static point_t | dorth_infty (dpoint_t p0, dpoint_t p2) |
| Return a direction that is 90 degrees counterclockwise from p2-p0, but then restricted to one of the major wind directions (n, nw, w, etc). | |
| static double | dpara (dpoint_t p0, dpoint_t p1, dpoint_t p2) |
| Return (p1-p0)x(p2-p0), the area of the parallelogram. | |
| static double | ddenom (dpoint_t p0, dpoint_t p2) |
| ddenom/dpara have the property that the square of radius 1 centered at p1 intersects the line p0p2 if |dpara(p0,p1,p2)| <= ddenom(p0,p2). | |
| static int | cyclic (int a, int b, int c) |
| Return 1 if a <= b < c < a, in a cyclic sense (mod n). | |
| static void | pointslope (privpath_t *pp, int i, int j, dpoint_t *ctr, dpoint_t *dir) |
| Determine the center and slope of the line i..j. | |
| static double | quadform (quadform_t Q, dpoint_t w) |
| Apply quadratic form Q to vector w = (w.x,w.y). | |
| static int | xprod (point_t p1, point_t p2) |
| Calculate p1 x p2. | |
| static double | cprod (dpoint_t p0, dpoint_t p1, dpoint_t p2, dpoint_t p3) |
| Calculate (p1-p0)x(p3-p2). | |
| static double | iprod (dpoint_t p0, dpoint_t p1, dpoint_t p2) |
| Calculate (p1-p0)*(p2-p0). | |
| static double | iprod1 (dpoint_t p0, dpoint_t p1, dpoint_t p2, dpoint_t p3) |
| Calculate (p1-p0)*(p3-p2). | |
| static double | ddist (dpoint_t p, dpoint_t q) |
| Calculate distance between two points. | |
| static dpoint_t | bezier (double t, dpoint_t p0, dpoint_t p1, dpoint_t p2, dpoint_t p3) |
| Calculate point of a bezier curve. | |
| static double | tangent (dpoint_t p0, dpoint_t p1, dpoint_t p2, dpoint_t p3, dpoint_t q0, dpoint_t q1) |
| Calculate the point t in [0..1] on the (convex) bezier curve (p0,p1,p2,p3) which is tangent to q1-q0. | |
| static int | calc_sums (privpath_t *pp) |
| Preparation: fill in the sum* fields of a path (used for later rapid summing). | |
| static int | calc_lon (privpath_t *pp) |
| Stage 1: Determine the straight subpaths (Sec. 2.2.1). | |
| static double | penalty3 (privpath_t *pp, int i, int j) |
| Stage 2: Calculate the optimal polygon (Sec. 2.2.2-2.2.4). | |
| static int | bestpolygon (privpath_t *pp) |
| Find the optimal polygon. | |
| static int | adjust_vertices (privpath_t *pp) |
| Stage 3: Vertex adjustment (Sec. 2.3.1). | |
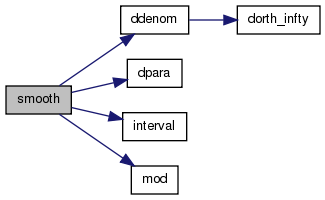
| static int ATTRIBUTE_UNUSED | smooth (privcurve_t *curve, int sign, double alphamax) |
| Stage 4: Smoothing and corner analysis (Sec. 2.3.3). | |
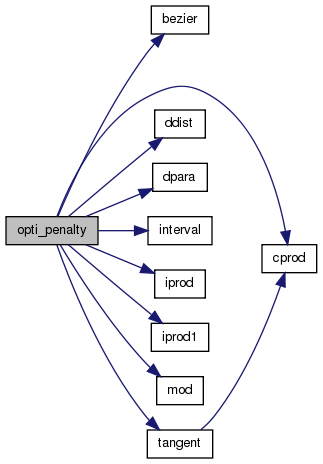
| static int | opti_penalty (privpath_t *pp, int i, int j, opti_t *res, double opttolerance, int *convc, double *areac) |
| Calculate best fit from i+.5 to j+.5. | |
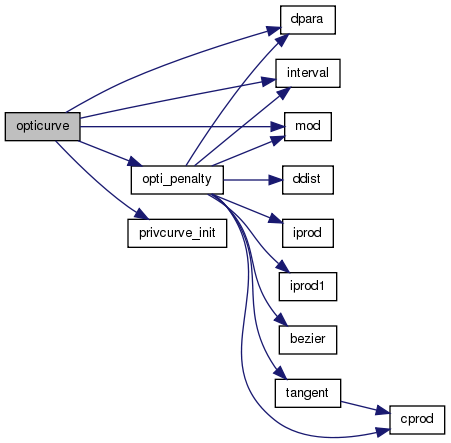
| static int ATTRIBUTE_UNUSED | opticurve (privpath_t *pp, double opttolerance) |
| Optimize the path p, replacing sequences of Bezier segments by a single segment when possible. | |
| double | plotpolygon (privpath_t *pp, FILE *f, double scale, const char *var_cutdepth, const char *var_safeZ, const char *var_plunge, const char *var_feedrate) |
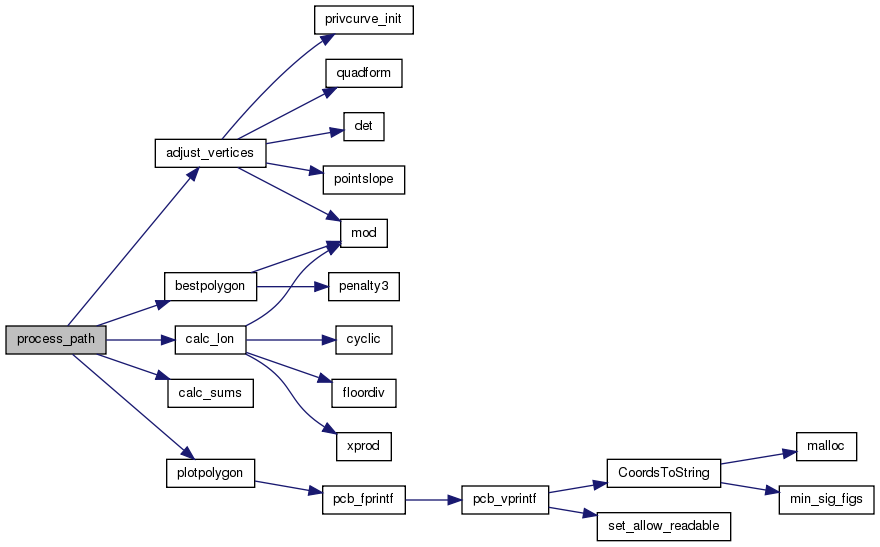
| double | process_path (path_t *plist, const potrace_param_t *param, const potrace_bitmap_t *bm, FILE *f, double scale, const char *var_cutdepth, const char *var_safeZ, const char *var_plunge, const char *var_feedrate) |
| Process path. | |
Transform jaggy paths into smooth curves.
This file was slightly modified by Alberto Maccioni to be used with PCB G-CODE exporter.
PCB, interactive printed circuit board design
Copyright (C) 2001-2007 Peter Selinger.
This file is part of Potrace. It is free software and it is covered by the GNU General Public License. See the file COPYING for details.
Definition in file trace.c.
| #define COS179 -0.999847695156 |
| #define INFTY 10000000 |
It suffices that this is longer than any path; it need not be really infinite.
Definition at line 40 of file trace.c.
Referenced by calc_lon().
| #define SAFE_MALLOC | ( | var, | |
| n, | |||
| typ | |||
| ) | if ((var = (typ *)malloc((n)*sizeof(typ))) == NULL) goto malloc_error |
Definition at line 47 of file trace.c.
Referenced by adjust_vertices(), bestpolygon(), calc_lon(), calc_sums(), and opticurve().
Definition at line 1515 of file trace.c.
Referenced by process_path().
| typedef double quadform_t[3][3] |
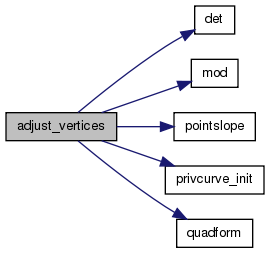
| static int adjust_vertices | ( | privpath_t * | pp | ) | [static] |
Stage 3: Vertex adjustment (Sec. 2.3.1).
Adjust vertices of optimal polygon: calculate the intersection of the two "optimal" line segments, then move it into the unit square if it lies outside.
Definition at line 803 of file trace.c.
References corners, potrace_privpath_s::curve, det(), potrace_privpath_s::len, potrace_privpath_s::m, m, min, mod(), n, potrace_privpath_s::po, pointslope(), privcurve_init(), potrace_privpath_s::pt, quadform(), s, SAFE_MALLOC, sq, privcurve_s::vertex, point_s::x, potrace_dpoint_s::x, x, potrace_privpath_s::x0, point_s::y, potrace_dpoint_s::y, y, and potrace_privpath_s::y0.
Referenced by process_path().
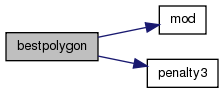
| static int bestpolygon | ( | privpath_t * | pp | ) | [static] |
Find the optimal polygon.
Fill in the m and po components.
Non-cyclic version: assumes i=0 is in the polygon.
Definition at line 672 of file trace.c.
References c, potrace_privpath_s::len, potrace_privpath_s::lon, potrace_privpath_s::m, m, mod(), n, penalty3(), potrace_privpath_s::po, and SAFE_MALLOC.
Referenced by process_path().
| static dpoint_t bezier | ( | double | t, |
| dpoint_t | p0, | ||
| dpoint_t | p1, | ||
| dpoint_t | p2, | ||
| dpoint_t | p3 | ||
| ) | [inline, static] |
Calculate point of a bezier curve.
Definition at line 302 of file trace.c.
References s, potrace_dpoint_s::x, and potrace_dpoint_s::y.
Referenced by opti_penalty().
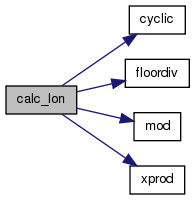
| static int calc_lon | ( | privpath_t * | pp | ) | [static] |
Stage 1: Determine the straight subpaths (Sec. 2.2.1).
Fill in the "lon" component of a path object (based on pt/len). For each i, lon[i] is the furthest index such that a straight line can be drawn from i to lon[i].
This algorithm depends on the fact that the existence of straight subpaths is a triplewise property. I.e., there exists a straight line through squares i0,...,in iff there exists a straight line through i,j,k, for all i0<=i<j<k<=in. (Proof?).
This implementation of calc_lon is O(n^2). It replaces an older O(n^3) version. A "constraint" means that future points must satisfy xprod(constraint[0], cur) >= 0 and xprod(constraint[1], cur) <= 0.
Definition at line 439 of file trace.c.
References abs, c, cyclic(), floordiv(), INFTY, potrace_privpath_s::len, potrace_privpath_s::lon, min, mod(), n, potrace_privpath_s::pt, SAFE_MALLOC, sign, point_s::x, x, xprod(), point_s::y, and y.
Referenced by process_path().
| static int calc_sums | ( | privpath_t * | pp | ) | [static] |
Preparation: fill in the sum* fields of a path (used for later rapid summing).
Definition at line 376 of file trace.c.
References potrace_privpath_s::len, n, potrace_privpath_s::pt, SAFE_MALLOC, potrace_privpath_s::sums, sums_s::x, point_s::x, x, potrace_privpath_s::x0, sums_s::x2, sums_s::xy, sums_s::y, point_s::y, y, potrace_privpath_s::y0, and sums_s::y2.
Referenced by process_path().
Calculate (p1-p0)x(p3-p2).
Definition at line 245 of file trace.c.
References potrace_dpoint_s::x, and potrace_dpoint_s::y.
Referenced by opti_penalty(), and tangent().
| static int cyclic | ( | int | a, |
| int | b, | ||
| int | c | ||
| ) | [inline, static] |
Return 1 if a <= b < c < a, in a cyclic sense (mod n).
Definition at line 102 of file trace.c.
Referenced by calc_lon().
ddenom/dpara have the property that the square of radius 1 centered at p1 intersects the line p0p2 if |dpara(p0,p1,p2)| <= ddenom(p0,p2).
Definition at line 91 of file trace.c.
References dorth_infty(), point_s::x, potrace_dpoint_s::x, potrace_dpoint_s::y, and point_s::y.
Referenced by smooth().

Calculate distance between two points.
Definition at line 293 of file trace.c.
References potrace_dpoint_s::x, and potrace_dpoint_s::y.
Referenced by opti_penalty().
Return a direction that is 90 degrees counterclockwise from p2-p0, but then restricted to one of the major wind directions (n, nw, w, etc).
Definition at line 59 of file trace.c.
References sign, point_s::x, potrace_dpoint_s::x, potrace_dpoint_s::y, and point_s::y.
Referenced by ddenom().
Return (p1-p0)x(p2-p0), the area of the parallelogram.
Definition at line 73 of file trace.c.
References potrace_dpoint_s::x, and potrace_dpoint_s::y.
Referenced by opti_penalty(), opticurve(), and smooth().
Calculate (p1-p0)*(p2-p0).
Definition at line 261 of file trace.c.
References potrace_dpoint_s::x, and potrace_dpoint_s::y.
Referenced by opti_penalty().
Calculate (p1-p0)*(p3-p2).
Definition at line 277 of file trace.c.
References potrace_dpoint_s::x, and potrace_dpoint_s::y.
Referenced by opti_penalty().
| static int opti_penalty | ( | privpath_t * | pp, |
| int | i, | ||
| int | j, | ||
| opti_t * | res, | ||
| double | opttolerance, | ||
| int * | convc, | ||
| double * | areac | ||
| ) | [static] |
Calculate best fit from i+.5 to j+.5.
Assume i<j (cyclically).
Definition at line 1137 of file trace.c.
References privcurve_s::alpha, opti_s::alpha, bezier(), opti_s::c, privcurve_s::c, COS179, cprod(), potrace_privpath_s::curve, ddist(), dpara(), interval(), iprod(), iprod1(), m, mod(), privcurve_s::n, opti_s::pen, opti_s::s, s, sign, sq, opti_s::t, tangent(), and privcurve_s::vertex.
Referenced by opticurve().
| static int ATTRIBUTE_UNUSED opticurve | ( | privpath_t * | pp, |
| double | opttolerance | ||
| ) | [static] |
Optimize the path p, replacing sequences of Bezier segments by a single segment when possible.
Definition at line 1314 of file trace.c.
References privcurve_s::alpha, opti_s::alpha, privcurve_s::alpha0, privcurve_s::alphacurve, privcurve_s::beta, opti_s::c, privcurve_s::c, potrace_privpath_s::curve, dpara(), interval(), len, m, mod(), privcurve_s::n, potrace_privpath_s::ocurve, opti_penalty(), opti_s::pen, POTRACE_CURVETO, privcurve_init(), opti_s::s, s, SAFE_MALLOC, sign, opti_s::t, privcurve_s::tag, and privcurve_s::vertex.
| static double penalty3 | ( | privpath_t * | pp, |
| int | i, | ||
| int | j | ||
| ) | [static] |
Stage 2: Calculate the optimal polygon (Sec. 2.2.2-2.2.4).
Auxiliary function: calculate the penalty of an edge from i to j in the given path. This needs the "lon" and "sum*" data.
Definition at line 620 of file trace.c.
References c, ex, ey, potrace_privpath_s::len, n, potrace_privpath_s::pt, px, py, s, potrace_privpath_s::sums, point_s::x, sums_s::x, x, sums_s::x2, sums_s::xy, point_s::y, sums_s::y, y, and sums_s::y2.
Referenced by bestpolygon().
| double plotpolygon | ( | privpath_t * | pp, |
| FILE * | f, | ||
| double | scale, | ||
| const char * | var_cutdepth, | ||
| const char * | var_safeZ, | ||
| const char * | var_plunge, | ||
| const char * | var_feedrate | ||
| ) |
Definition at line 1481 of file trace.c.
References potrace_privpath_s::m, m, pcb_fprintf(), potrace_privpath_s::po, potrace_privpath_s::pt, x, and y.
Referenced by process_path().

| static void pointslope | ( | privpath_t * | pp, |
| int | i, | ||
| int | j, | ||
| dpoint_t * | ctr, | ||
| dpoint_t * | dir | ||
| ) | [static] |
Determine the center and slope of the line i..j.
Assume i<j. Needs "sum" components of p to be set.
Definition at line 120 of file trace.c.
References c, potrace_privpath_s::len, n, potrace_privpath_s::sums, potrace_dpoint_s::x, sums_s::x, x, sums_s::x2, sums_s::xy, potrace_dpoint_s::y, sums_s::y, y, and sums_s::y2.
Referenced by adjust_vertices().
| double process_path | ( | path_t * | plist, |
| const potrace_param_t * | param, | ||
| const potrace_bitmap_t * | bm, | ||
| FILE * | f, | ||
| double | scale, | ||
| const char * | var_cutdepth, | ||
| const char * | var_safeZ, | ||
| const char * | var_plunge, | ||
| const char * | var_feedrate | ||
| ) |
Process path.
Definition at line 1523 of file trace.c.
References adjust_vertices(), bestpolygon(), calc_lon(), calc_sums(), list_forall, n, plotpolygon(), potrace_path_s::priv, and TRY.
Referenced by gcode_do_export().
| static double quadform | ( | quadform_t | Q, |
| dpoint_t | w | ||
| ) | [inline, static] |
Apply quadratic form Q to vector w = (w.x,w.y).
Definition at line 211 of file trace.c.
References potrace_dpoint_s::x, and potrace_dpoint_s::y.
Referenced by adjust_vertices().
| static int ATTRIBUTE_UNUSED smooth | ( | privcurve_t * | curve, |
| int | sign, | ||
| double | alphamax | ||
| ) | [static] |
Stage 4: Smoothing and corner analysis (Sec. 2.3.3).
Definition at line 1038 of file trace.c.
References privcurve_s::alpha, privcurve_s::alpha0, privcurve_s::alphacurve, privcurve_s::beta, privcurve_s::c, ddenom(), dpara(), interval(), m, mod(), privcurve_s::n, POTRACE_CORNER, POTRACE_CURVETO, privcurve_s::tag, and privcurve_s::vertex.
| static double tangent | ( | dpoint_t | p0, |
| dpoint_t | p1, | ||
| dpoint_t | p2, | ||
| dpoint_t | p3, | ||
| dpoint_t | q0, | ||
| dpoint_t | q1 | ||
| ) | [static] |
Calculate the point t in [0..1] on the (convex) bezier curve (p0,p1,p2,p3) which is tangent to q1-q0.
Definition at line 328 of file trace.c.
References B, c, cprod(), and s.
Referenced by opti_penalty(), and Puller().

Calculate p1 x p2.
Definition at line 236 of file trace.c.
References point_s::x, and point_s::y.
Referenced by calc_lon().
 1.7.3
1.7.3